訂正有価証券届出書(新規公開時)
事業内容
当社は、「科学は社会貢献のためにある」という創業精神のもと、「ドローン(※1)は、空の産業革命をもたらす」という企業ビジョンを掲げ、ロボットの自律制御(※2)技術を用いて業務効率化・無人化・IoT(※3)化を実現するシステムを創り、既存の様々な業務を改革していくことで、国内外企業の競争力を高めることを目指し、事業を展開しております。
その主たる事業内容は、「インダストリアル向け」、「コーポレート向け」の飛行ロボット(以下、「ドローン」という。)の自社開発、ドローンを活用した無人化・IoTシステムの受注開発、生産、及び販売・サービス提供であります。
ドローンの普及及び技術革新により、既存産業の業務効率化並びに新規価値創出が期待されております。当社では、自律制御の研究開発をゼロから国内で行うことで技術力を蓄積してきており、「自ら考えて飛ぶ」最先端の自律制御を中心に点検、物流、防災分野などで求められる周辺技術・システムも開発し、現存するドローン市場の定義に縛られることなく顧客に対してドローンを活用した新たな無人化・IoTシステムを提示してまいります。
当社の事業は、ドローン関連事業の単一セグメントであるため、以下に当社の主要な製品及びサービスの内容を記載いたします。
(1)当社の事業内容
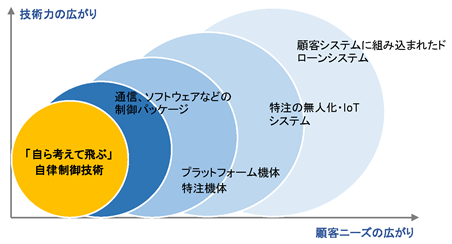
当社は「自ら考えて飛ぶ」自律制御技術を中心に周辺技術・システム開発能力を一気通貫で保有することで、点検、物流、防災、空撮、測量、農業といった分野でドローンを活用したインダストリアル向け無人化・IoTシステムの構築に係る事業を運営しております。最先端の制御技術を核として、通信・ソフトウエアなどを統合した制御パッケージや高性能な機体プラットフォーム(※4)の提供が可能となるとともに、用途別にカスタマイズしたインダストリアル向け特注機体、特注システム、最終的には顧客システムに統合されたレベルまで、事業として幅広く対応することが可能となっております。
またドローン以外の分野に対しても、機械等が「自ら考える」ための制御技術を通信やソフトウエアと組み合わせて制御プラットフォームとして販売しております。当該プラットフォームの主な活用見込先は、宇宙産業や無人地上車両であります。
■ 当社が提供可能な技術・サービスの広がり
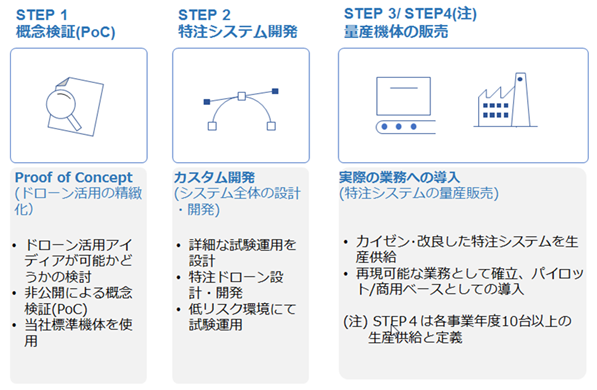
当社のビジネスモデルは、顧客企業からのドローン導入の打診に基づき、顧客企業におけるドローン活用による課題解決の概念検証(PoC:Proof of Concept(※5))(STEP1)、及び用途に応じたシステム全体の仕様策定と特注システム開発を請け負うシステムインテグレータとしての役割(STEP2)と、その後の特注システムの量産供給を担う製造業としての役割(STEP3、STEP4)を併せ持っております。
当社では、主に大企業におけるドローン活用において、検討段階から実際の導入まで全面的なシステム構築をワンストップで提供することを前提とした営業活動を促進しており、これまでにも楽天株式会社の「天空」や株式会社NJSの「AirSlider」などの実績があります。既に主要顧客約40社に対して、概念検証(PoC)(STEP1)に係るサービス提供に取り組んでおり、今後の特注システム開発や量産供給に繋がるように営業活動を促進しております。
サービス提供の各段階(STEP)に関して、まずSTEP1として、顧客のドローン導入のニーズを踏まえて、課題解決のために当社のテスト機体を用いた概念検証(PoC)に係るサービスを有償で提供しております。この概念検証(PoC)では、最小限のシステム構成により顧客のドローン活用の導入検討における障壁を下げつつ、業務効率化・無人化・IoT化の検証を並行して行っております。なお、当社の指す概念検証(PoC)は「導入コンサルティング」を超えた概念であり、単にアイデア提供等を行うサービスではなく、目的の業務においてドローン導入の有効性を判断するための飛行試験・実演を伴う概念検証サービスを指します。
顧客の課題解決に合わせた概念検証(PoC)を経て、次のサービス提供の段階において、STEP2として、顧客先の既存システムへの組み込みも含めた特注システム全体の設計・開発を行っております。このSTEPで業務効率化などの効果実現に向け、特注システムの提供のみに留まらず、安全導入に不可欠なドローンの操作シミュレータやドローンの保守点検サービスを提供し、システム導入・運用サポートを一貫して提供しております。なお、顧客の既存システムへ組み込むソリューションの事例としては、工場設備や建物・橋梁等の点検、下水道管路内等の閉鎖環境の調査、掘削現場における測量や農地の成育状況のモニタリング、災害現場の把握等が考えられます。これらの特注システム開発に際しては、概念検証(PoC)のサービス提供料や特注システムの仕様提案・設計・開発・試験運用に係るカスタム開発料を主な収益源としております。概念検証(PoC)を含めて有償のサービスモデルを構築することで、顧客における継続的なプロジェクト実施を可能にしております。
次のサービス提供の段階において、当社では、STEP3及びSTEP4で、顧客先における試用(パイロット)もしくは商用ベースでの導入として、特注システムの生産供給を行っております。STEP2で開発した特注システムの繰り返し生産並びに保守・メンテナンスサポートを実施しております。このSTEPでは、顧客の実業務への展開から得られた知見に基づき、特注システムの「カイゼン」・改良を繰り返すこと、及び効率化やコスト削減を目的とした特注システムの生産改善に取り組んでおります。なお、当社では、STEP4を各事業年度の発注数量が10台以上の生産供給と定義しております。
当社では、各段階(STEP)毎に収益を獲得する案件が一般的ですが、案件によっては各STEPを組み合わせて包括的に契約を締結する場合もあります。
なお、機体販売後の運用サポートにおいては、販売後定常的に発生する機体の保守手数料や消耗品の販売料及びスポットでのコンサルティングサービスに係るサービス提供料を主な収益源としております。
■ ドローンを活用した無人化・IoTシステムのビジネス
■ STEP別の案件数及び量産機体の販売台数の推移
(注)主要顧客は前事業年度から引き続き2事業年度連続で発注している顧客数としております。
■ 当社のインダストリアル向けドローンを活用した無人化・IoTシステムの比較コンセプトのイメージ(石油・化学プラント運営企業に対する総合的なソリューションサービスのイメージ)
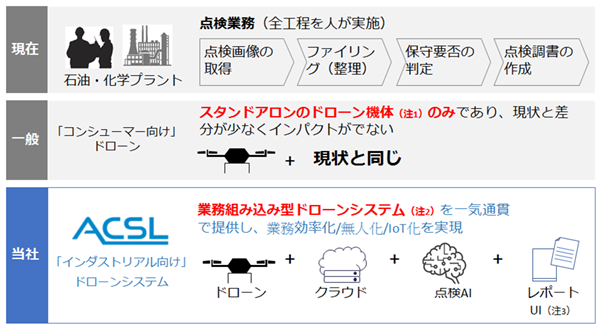 (注)1.スタンドアロンのドローン機体:外部のIoT機器やシステムと繋がっておらず、機体のみが独立して存在しているドローン機体のこと
(注)1.スタンドアロンのドローン機体:外部のIoT機器やシステムと繋がっておらず、機体のみが独立して存在しているドローン機体のこと
2.業務組み込み型ドローンシステム:ドローン機体が既存のIoT機器やシステムとインターネットなどを活用して繋がり一体化されたシステムのこと
3.レポートUI:点検調書等のレポートにおける情報の表示
■ STEP1 概念検証(PoC)、STEP2 特注システム開発の事例(株式会社NJSと共同開発した閉鎖環境(下水道)点検ドローンとドローンからの撮影画像)
(2)当社保有のプラットフォーム技術
当社は千葉大学発のスタートアップ企業として創業して以来、自律制御技術を中核技術と位置づけ、継続的に開発投資を行ってまいりました。2017年より、自社開発の制御技術の競争力を高めるために、無人化・IoTシステムの一部としてドローンを採用することが多い企業需要に着目し、ドローンを活用したインダストリアル向けの無人化・IoTシステムの開発に資本注力してまいりました。
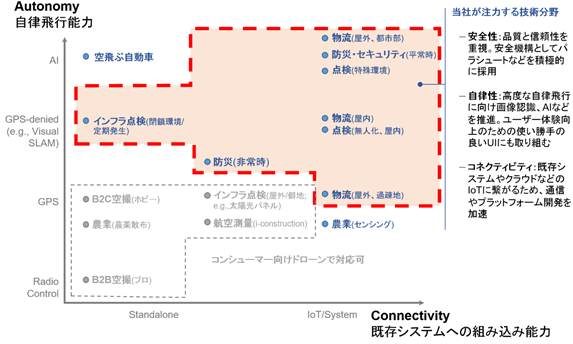
この分野においてシステム構築を実現するためには、非GPS(※6)環境などあらゆる環境での飛行を可能にする最先端の「自律飛行(※7)能力(Autonomy)」と、業務効率化・無人化・IoT化を実現するための「既存システムへの組み込み能力(Connectivity)」が必要になります。当社では、非GPS環境下での自律飛行を実現する画像処理による自己位置推定(Visual SLAM(※8))(ドローン以外にもUGV(Unmanned Ground Vehicle:無人地上車両)などにも適用可)、ドローンの飛行ログや取得画像データ蓄積・解析を行うための独自通信・クラウド(※9)システムの整備、人間や通路認識などの飛行制御向けAI(※10)、安全機能強化として落下エネルギーを約90%減少させ、高度10m以上であれば終端速度を5m/s程度まで減速可能なパラシュート等を、点検、防災、物流、測量など多様な用途に対応可能なプラットフォーム技術として開発・商用化しております。
■ 当社が資本投資を行っている技術分野
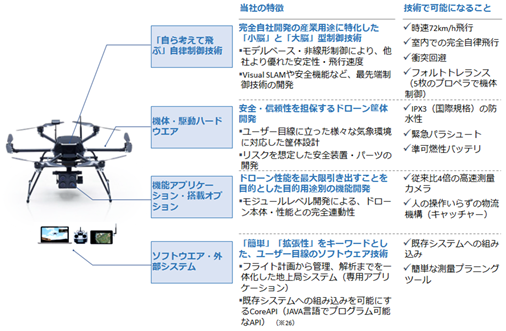
現在、商品展開中のインダストリアル向けプラットフォーム機体「ACSL-PF1」及びその派生形は、当社の新技術を全て集約させ、多様な用途に対応する高度な飛行性能と安全性を実現しております。「ACSL-PF1」の開発コンセプトは、あらゆる用途に対応可能とするべく最大公約数的な技術要素を集約した機体であり、主に以下の4つに分解することができます。
① 「自ら考えて飛ぶ」自律制御技術
当社の中核技術でもある自律制御技術は、人間でいうところの「頭脳」に相当します。ドローンの姿勢制御、飛行動作制御等、人間でいうところの運動機能をつかさどる「小脳」に該当する部分の技術については、モデルベース(※11)の先端制御理論に加え、一部で非線形制御(※12)に係るアルゴリズム(※13)を使用しており、競合他社やオープンソースコードを推進する団体が採用する一般的なPID制御(※14)と比較しても、耐風性や高速飛行時の安定性、突発的な動作に対する安定性などで優れた性能を示しております。
また、人間でいうところの目で見ることや自ら考えること等に係る機能をつかさどる「大脳」に相当する部分については、画像処理による自己位置推定(Visual SLAM)やAIによる環境認識を開発し、ドローンの「小脳」部分に統合しており、従来のドローンに搭載されていた衛星(GPS・GNSS(※15))を用いる制御では自律飛行することができなかった非GPS環境下での完全自律飛行を実現しております。
■ 最先端の「大脳」技術 - Visual SLAM

当社では、今後本格化する目視外での飛行や、通信が途絶えた場面、制御不能な状況を想定し、自律的ゴーホーム機能や各種緊急時の自動対応指示機能、操作・制御介入機能を搭載し、より安全で信頼性の高い制御を可能にする開発を進めております。FMEA(※18)等の航空機技術で培われた知見を活用し、故障を論理的、系統的に分析することで、その対応を重要なものから順次、対策技術を導入していくことを試みております。
例えば、当社では通信の冗長性を担保しております。一般的には920MHz帯及び2.4MHz、5.7GHz帯が通信として採用されておりますが、当社の制御技術では片方の通信が不可能になった場合はもう片方によって緊急操作介入ができるようになっております。なお、両方の通信が不可能な場合においても、ドローンは60秒間ホバリングを続けた上、操作介入なしでその場に自動で着陸するフェールセーフ(※19)機能を実装しております。
またプロペラが6枚以上実装されている当社ドローンでは、万一、何らかの原因でESC(モーターの回転数を制御する装置)又はモーターそのものが故障しプロペラ1枚が回らなくなった場合においても、残りの回転しているモーターとプロペラを使用してバランスを保ち、安全に着陸する技術を開発しております。この要素技術開発を元に、標準技術として商品化すべく実装試験を行っております。
② 機体・駆動ハードウエア
機体・駆動ハードウエアは、ドローンの本体を構成する重要な要素であり、人間でいうところの「骨」や「筋肉」に相当します。主に、構造機能であるCFRP(※20)やマグネシウム合金等と、駆動機能であるモーター、CFRPプロペラ及びLiPO(※21)バッテリー等から構成されています。長時間、長距離飛行を行うための軽量化と安全に飛行するためのしっかりとした強度の両立、さらに雨に対する防滴性のような環境耐性も要求されます。
当社では、CFRPとマグネシウム合金を採用し極めて軽量な機体構造により50分程度の飛行時間(ペイロードなしの場合)を実現するとともに、防災や物流向けには雨天時飛行を可能とするため国際IEC規格のIPX3(※22)防水性を満たす機体ハードウエア技術を製品化しております。
③ 機能アプリケーション(※23)・搭載オプション
自律制御技術と機体・駆動ハードウエア技術を基に飛行ロボットが実現した後に、用途を持たせるためには機能アプリケーションや搭載オプションの追加が必要となります。ドローンは、主に「目」(データ収集)や「手」(作業)の代わりとしての役割を果たすことができ、カメラやセンサーを搭載することで「目」の代わりの役割を、物品輸送用のキャッチャー(※24)や散布機を搭載することで「手」の代わりの機能を果たすことになります。
多くの場合、機能アプリケーションは制御と切り離された形で外付けとなる要素ですが、当社では、制御とのシステム連携を行うアプリケーションやオプションを開発、提供しております。測量・点検、防災・災害、物流・宅配など多様な用途に応じたインダストリアル向けのソリューションに必要な付属センサーやカメラ、パラシュート等の安全装置付属品など、アプリケーション別のカスタマイズも可能であり、個々の顧客のニーズに対応しております。
例えば、安全装置のパラシュートでは、何らかの障害でドローンが故障して落下した場合、地上で大事故とならないように機体が落下していることを検知し、自動でパラシュートが開きます。安全機能として当社ドローン向けに開発されたパラシュートは、自由落下や機体傾き、電気信号途絶を自動検知し、0.5秒で開化することにより落下エネルギーをパラシュート非搭載の機体との比較で最大90%程度削減し、高度10m以上であれば終端速度を5m/s程度まで減速することを可能としております。
また、カメラモジュールの開発会社である株式会社ザクティとは、ドローンの高速飛行を最大限活用して測量や防災分野で求められる高解像度画像を撮影可能とするべく、高度なブレ補正、高解像度・高速連写の撮影が可能なデジタルイメージング技術を活用した専用の4眼カメラを共同開発しております。
■ 当社製品の機能アプリケーション・搭載オプションの例(高速カメラ、物流用運搬機構)
■ 当社製品における安全装置のパラシュート
■ 時速50km/hの高速飛行に連動した株式会社ザクティと共同開発の高性能カメラによる高度100mからの撮影画像のイメージ(2cm分解能(ひとつの画素が2cmの大きさを示す)の画像を時速50km/hで撮影可能)

④ ソフトウエア・外部システム
ドローンは本体側での計算処理(エッジ処理)による自律的な飛行を行いますが、一般的には920MHzや2.4GHz、5.7GHz帯の周波数を用いて地上局と通信しながら飛行を行っております。ソフトウエア技術は、自律飛行を行うためのルート設計及びドローンの飛行中の情報を遠隔にて可視化・モニタリングするために必要なもので、特に目視外飛行において重要性が増しております。
当社では、パソコンやタブレット、スマートフォンなどに搭載されたソフトウエアにリアルタイム情報を表示し、飛行速度や高度などの機体状態や飛行状況の管理を行っております。独自開発のソフトウエア(PF-Station)からは飛行ルート変更の操作指示を与えたり、緊急時には、非常時の介入操作指示を出したりすることが可能です。同時に、気象情報や地図情報、近隣の有人機飛行状況等の飛行管理に必要な多彩な情報を、地上の通信回線から取得し統合表示を行うことで、PF-Stationはドローン飛行管理の司令塔の役割を果たします。
また、最近ではクラウドサービスとの接続、顧客企業の外部システムへの統合API(※25)、ドローン飛行練習用のシミュレーションソフトウエアなども重要になってきており、当社においても開発、商品化を行っております。
■ PF-Station - 飛行経路を遠隔モニターしているときの遠隔端末上(パソコンなど)の表示状況

■ 当社製品であるインダストリアル向けプラットフォーム機体「ACSL-PF1」の技術要素
(3)国家プロジェクトへの参画
当社製品・サービスがインダストリアル向けドローン業界におけるデファクト・スタンダードとなるためには、今後も継続的かつ積極的に研究開発活動を実施していくことが不可欠となります。そこで、当社では産学官連携で様々なプロジェクトに参画し、最先端の技術開発に取り組んでおります。国家プロジェクトにおいては、各プロジェクトにおいて発生した研究開発費用について、管轄機関の監査を受けて認められた金額を、助成金又は補助金として収受しております。なお、助成金又は補助金に関して、新規技術の研究開発に係るものについては、営業外収益として計上しております。また、新規の研究開発を行わず、既存の当社の技術を用いて委託された実験を行うことが主目的であるものについては、売上高として計上しております。
当社が現在取り組んでいる主な国家プロジェクトは、以下のとおりです。
[事業系統図]
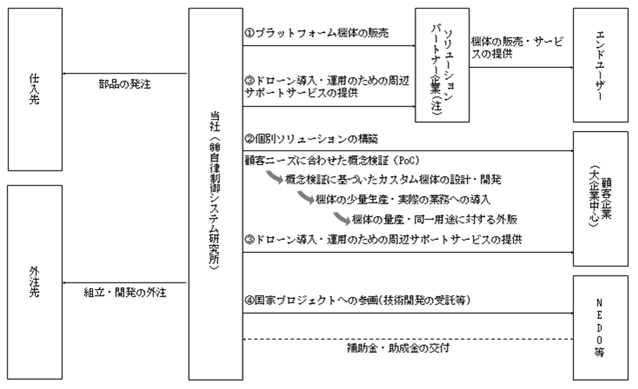 (注)パートナー企業の一部を対象に、当社のドローンの転売又はドローンに付加価値を追加したソリューションをパートナークライアントの事業として商用展開を可能とすることを想定し、「ソリューションパートナー」契約を締結しております。
(注)パートナー企業の一部を対象に、当社のドローンの転売又はドローンに付加価値を追加したソリューションをパートナークライアントの事業として商用展開を可能とすることを想定し、「ソリューションパートナー」契約を締結しております。
用語解説
本項「3 事業の内容」において使用しております用語の定義について以下に記します。
その主たる事業内容は、「インダストリアル向け」、「コーポレート向け」の飛行ロボット(以下、「ドローン」という。)の自社開発、ドローンを活用した無人化・IoTシステムの受注開発、生産、及び販売・サービス提供であります。
ドローンの普及及び技術革新により、既存産業の業務効率化並びに新規価値創出が期待されております。当社では、自律制御の研究開発をゼロから国内で行うことで技術力を蓄積してきており、「自ら考えて飛ぶ」最先端の自律制御を中心に点検、物流、防災分野などで求められる周辺技術・システムも開発し、現存するドローン市場の定義に縛られることなく顧客に対してドローンを活用した新たな無人化・IoTシステムを提示してまいります。
当社の事業は、ドローン関連事業の単一セグメントであるため、以下に当社の主要な製品及びサービスの内容を記載いたします。
(1)当社の事業内容
当社は「自ら考えて飛ぶ」自律制御技術を中心に周辺技術・システム開発能力を一気通貫で保有することで、点検、物流、防災、空撮、測量、農業といった分野でドローンを活用したインダストリアル向け無人化・IoTシステムの構築に係る事業を運営しております。最先端の制御技術を核として、通信・ソフトウエアなどを統合した制御パッケージや高性能な機体プラットフォーム(※4)の提供が可能となるとともに、用途別にカスタマイズしたインダストリアル向け特注機体、特注システム、最終的には顧客システムに統合されたレベルまで、事業として幅広く対応することが可能となっております。
またドローン以外の分野に対しても、機械等が「自ら考える」ための制御技術を通信やソフトウエアと組み合わせて制御プラットフォームとして販売しております。当該プラットフォームの主な活用見込先は、宇宙産業や無人地上車両であります。
■ 当社が提供可能な技術・サービスの広がり
当社のビジネスモデルは、顧客企業からのドローン導入の打診に基づき、顧客企業におけるドローン活用による課題解決の概念検証(PoC:Proof of Concept(※5))(STEP1)、及び用途に応じたシステム全体の仕様策定と特注システム開発を請け負うシステムインテグレータとしての役割(STEP2)と、その後の特注システムの量産供給を担う製造業としての役割(STEP3、STEP4)を併せ持っております。
当社では、主に大企業におけるドローン活用において、検討段階から実際の導入まで全面的なシステム構築をワンストップで提供することを前提とした営業活動を促進しており、これまでにも楽天株式会社の「天空」や株式会社NJSの「AirSlider」などの実績があります。既に主要顧客約40社に対して、概念検証(PoC)(STEP1)に係るサービス提供に取り組んでおり、今後の特注システム開発や量産供給に繋がるように営業活動を促進しております。
サービス提供の各段階(STEP)に関して、まずSTEP1として、顧客のドローン導入のニーズを踏まえて、課題解決のために当社のテスト機体を用いた概念検証(PoC)に係るサービスを有償で提供しております。この概念検証(PoC)では、最小限のシステム構成により顧客のドローン活用の導入検討における障壁を下げつつ、業務効率化・無人化・IoT化の検証を並行して行っております。なお、当社の指す概念検証(PoC)は「導入コンサルティング」を超えた概念であり、単にアイデア提供等を行うサービスではなく、目的の業務においてドローン導入の有効性を判断するための飛行試験・実演を伴う概念検証サービスを指します。
顧客の課題解決に合わせた概念検証(PoC)を経て、次のサービス提供の段階において、STEP2として、顧客先の既存システムへの組み込みも含めた特注システム全体の設計・開発を行っております。このSTEPで業務効率化などの効果実現に向け、特注システムの提供のみに留まらず、安全導入に不可欠なドローンの操作シミュレータやドローンの保守点検サービスを提供し、システム導入・運用サポートを一貫して提供しております。なお、顧客の既存システムへ組み込むソリューションの事例としては、工場設備や建物・橋梁等の点検、下水道管路内等の閉鎖環境の調査、掘削現場における測量や農地の成育状況のモニタリング、災害現場の把握等が考えられます。これらの特注システム開発に際しては、概念検証(PoC)のサービス提供料や特注システムの仕様提案・設計・開発・試験運用に係るカスタム開発料を主な収益源としております。概念検証(PoC)を含めて有償のサービスモデルを構築することで、顧客における継続的なプロジェクト実施を可能にしております。
次のサービス提供の段階において、当社では、STEP3及びSTEP4で、顧客先における試用(パイロット)もしくは商用ベースでの導入として、特注システムの生産供給を行っております。STEP2で開発した特注システムの繰り返し生産並びに保守・メンテナンスサポートを実施しております。このSTEPでは、顧客の実業務への展開から得られた知見に基づき、特注システムの「カイゼン」・改良を繰り返すこと、及び効率化やコスト削減を目的とした特注システムの生産改善に取り組んでおります。なお、当社では、STEP4を各事業年度の発注数量が10台以上の生産供給と定義しております。
当社では、各段階(STEP)毎に収益を獲得する案件が一般的ですが、案件によっては各STEPを組み合わせて包括的に契約を締結する場合もあります。
なお、機体販売後の運用サポートにおいては、販売後定常的に発生する機体の保守手数料や消耗品の販売料及びスポットでのコンサルティングサービスに係るサービス提供料を主な収益源としております。
■ ドローンを活用した無人化・IoTシステムのビジネス
■ STEP別の案件数及び量産機体の販売台数の推移
| 2017年3月期 | 2018年3月期 | 2019年3月期 第2四半期累計期間 | ||
| ソリューションの構築 (STEP1、STEP2) | 案件数(件) | 12 | 60 | 23 |
| 量産機体の販売 (STEP3、STEP4) | 主要顧客数(社) | 4 | 5 | 4 |
| 販売台数(台) | 40 | 40 | 24 | |
(注)主要顧客は前事業年度から引き続き2事業年度連続で発注している顧客数としております。
■ 当社のインダストリアル向けドローンを活用した無人化・IoTシステムの比較コンセプトのイメージ(石油・化学プラント運営企業に対する総合的なソリューションサービスのイメージ)
(注)1.スタンドアロンのドローン機体:外部のIoT機器やシステムと繋がっておらず、機体のみが独立して存在しているドローン機体のこと2.業務組み込み型ドローンシステム:ドローン機体が既存のIoT機器やシステムとインターネットなどを活用して繋がり一体化されたシステムのこと
3.レポートUI:点検調書等のレポートにおける情報の表示
■ STEP1 概念検証(PoC)、STEP2 特注システム開発の事例(株式会社NJSと共同開発した閉鎖環境(下水道)点検ドローンとドローンからの撮影画像)
| □ 閉鎖環境(下水道)点検ドローン | □ 閉鎖環境(下水道)点検ドローンからの撮影画像 | |
 |  |
(2)当社保有のプラットフォーム技術
当社は千葉大学発のスタートアップ企業として創業して以来、自律制御技術を中核技術と位置づけ、継続的に開発投資を行ってまいりました。2017年より、自社開発の制御技術の競争力を高めるために、無人化・IoTシステムの一部としてドローンを採用することが多い企業需要に着目し、ドローンを活用したインダストリアル向けの無人化・IoTシステムの開発に資本注力してまいりました。
この分野においてシステム構築を実現するためには、非GPS(※6)環境などあらゆる環境での飛行を可能にする最先端の「自律飛行(※7)能力(Autonomy)」と、業務効率化・無人化・IoT化を実現するための「既存システムへの組み込み能力(Connectivity)」が必要になります。当社では、非GPS環境下での自律飛行を実現する画像処理による自己位置推定(Visual SLAM(※8))(ドローン以外にもUGV(Unmanned Ground Vehicle:無人地上車両)などにも適用可)、ドローンの飛行ログや取得画像データ蓄積・解析を行うための独自通信・クラウド(※9)システムの整備、人間や通路認識などの飛行制御向けAI(※10)、安全機能強化として落下エネルギーを約90%減少させ、高度10m以上であれば終端速度を5m/s程度まで減速可能なパラシュート等を、点検、防災、物流、測量など多様な用途に対応可能なプラットフォーム技術として開発・商用化しております。
■ 当社が資本投資を行っている技術分野
現在、商品展開中のインダストリアル向けプラットフォーム機体「ACSL-PF1」及びその派生形は、当社の新技術を全て集約させ、多様な用途に対応する高度な飛行性能と安全性を実現しております。「ACSL-PF1」の開発コンセプトは、あらゆる用途に対応可能とするべく最大公約数的な技術要素を集約した機体であり、主に以下の4つに分解することができます。
① 「自ら考えて飛ぶ」自律制御技術
当社の中核技術でもある自律制御技術は、人間でいうところの「頭脳」に相当します。ドローンの姿勢制御、飛行動作制御等、人間でいうところの運動機能をつかさどる「小脳」に該当する部分の技術については、モデルベース(※11)の先端制御理論に加え、一部で非線形制御(※12)に係るアルゴリズム(※13)を使用しており、競合他社やオープンソースコードを推進する団体が採用する一般的なPID制御(※14)と比較しても、耐風性や高速飛行時の安定性、突発的な動作に対する安定性などで優れた性能を示しております。
また、人間でいうところの目で見ることや自ら考えること等に係る機能をつかさどる「大脳」に相当する部分については、画像処理による自己位置推定(Visual SLAM)やAIによる環境認識を開発し、ドローンの「小脳」部分に統合しており、従来のドローンに搭載されていた衛星(GPS・GNSS(※15))を用いる制御では自律飛行することができなかった非GPS環境下での完全自律飛行を実現しております。
■ 最先端の「大脳」技術 - Visual SLAM
当社では、今後本格化する目視外での飛行や、通信が途絶えた場面、制御不能な状況を想定し、自律的ゴーホーム機能や各種緊急時の自動対応指示機能、操作・制御介入機能を搭載し、より安全で信頼性の高い制御を可能にする開発を進めております。FMEA(※18)等の航空機技術で培われた知見を活用し、故障を論理的、系統的に分析することで、その対応を重要なものから順次、対策技術を導入していくことを試みております。
例えば、当社では通信の冗長性を担保しております。一般的には920MHz帯及び2.4MHz、5.7GHz帯が通信として採用されておりますが、当社の制御技術では片方の通信が不可能になった場合はもう片方によって緊急操作介入ができるようになっております。なお、両方の通信が不可能な場合においても、ドローンは60秒間ホバリングを続けた上、操作介入なしでその場に自動で着陸するフェールセーフ(※19)機能を実装しております。
またプロペラが6枚以上実装されている当社ドローンでは、万一、何らかの原因でESC(モーターの回転数を制御する装置)又はモーターそのものが故障しプロペラ1枚が回らなくなった場合においても、残りの回転しているモーターとプロペラを使用してバランスを保ち、安全に着陸する技術を開発しております。この要素技術開発を元に、標準技術として商品化すべく実装試験を行っております。
② 機体・駆動ハードウエア
機体・駆動ハードウエアは、ドローンの本体を構成する重要な要素であり、人間でいうところの「骨」や「筋肉」に相当します。主に、構造機能であるCFRP(※20)やマグネシウム合金等と、駆動機能であるモーター、CFRPプロペラ及びLiPO(※21)バッテリー等から構成されています。長時間、長距離飛行を行うための軽量化と安全に飛行するためのしっかりとした強度の両立、さらに雨に対する防滴性のような環境耐性も要求されます。
当社では、CFRPとマグネシウム合金を採用し極めて軽量な機体構造により50分程度の飛行時間(ペイロードなしの場合)を実現するとともに、防災や物流向けには雨天時飛行を可能とするため国際IEC規格のIPX3(※22)防水性を満たす機体ハードウエア技術を製品化しております。
③ 機能アプリケーション(※23)・搭載オプション
自律制御技術と機体・駆動ハードウエア技術を基に飛行ロボットが実現した後に、用途を持たせるためには機能アプリケーションや搭載オプションの追加が必要となります。ドローンは、主に「目」(データ収集)や「手」(作業)の代わりとしての役割を果たすことができ、カメラやセンサーを搭載することで「目」の代わりの役割を、物品輸送用のキャッチャー(※24)や散布機を搭載することで「手」の代わりの機能を果たすことになります。
多くの場合、機能アプリケーションは制御と切り離された形で外付けとなる要素ですが、当社では、制御とのシステム連携を行うアプリケーションやオプションを開発、提供しております。測量・点検、防災・災害、物流・宅配など多様な用途に応じたインダストリアル向けのソリューションに必要な付属センサーやカメラ、パラシュート等の安全装置付属品など、アプリケーション別のカスタマイズも可能であり、個々の顧客のニーズに対応しております。
例えば、安全装置のパラシュートでは、何らかの障害でドローンが故障して落下した場合、地上で大事故とならないように機体が落下していることを検知し、自動でパラシュートが開きます。安全機能として当社ドローン向けに開発されたパラシュートは、自由落下や機体傾き、電気信号途絶を自動検知し、0.5秒で開化することにより落下エネルギーをパラシュート非搭載の機体との比較で最大90%程度削減し、高度10m以上であれば終端速度を5m/s程度まで減速することを可能としております。
また、カメラモジュールの開発会社である株式会社ザクティとは、ドローンの高速飛行を最大限活用して測量や防災分野で求められる高解像度画像を撮影可能とするべく、高度なブレ補正、高解像度・高速連写の撮影が可能なデジタルイメージング技術を活用した専用の4眼カメラを共同開発しております。
■ 当社製品の機能アプリケーション・搭載オプションの例(高速カメラ、物流用運搬機構)
 |  |
■ 当社製品における安全装置のパラシュート
 | 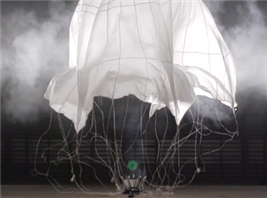 |
■ 時速50km/hの高速飛行に連動した株式会社ザクティと共同開発の高性能カメラによる高度100mからの撮影画像のイメージ(2cm分解能(ひとつの画素が2cmの大きさを示す)の画像を時速50km/hで撮影可能)
④ ソフトウエア・外部システム
ドローンは本体側での計算処理(エッジ処理)による自律的な飛行を行いますが、一般的には920MHzや2.4GHz、5.7GHz帯の周波数を用いて地上局と通信しながら飛行を行っております。ソフトウエア技術は、自律飛行を行うためのルート設計及びドローンの飛行中の情報を遠隔にて可視化・モニタリングするために必要なもので、特に目視外飛行において重要性が増しております。
当社では、パソコンやタブレット、スマートフォンなどに搭載されたソフトウエアにリアルタイム情報を表示し、飛行速度や高度などの機体状態や飛行状況の管理を行っております。独自開発のソフトウエア(PF-Station)からは飛行ルート変更の操作指示を与えたり、緊急時には、非常時の介入操作指示を出したりすることが可能です。同時に、気象情報や地図情報、近隣の有人機飛行状況等の飛行管理に必要な多彩な情報を、地上の通信回線から取得し統合表示を行うことで、PF-Stationはドローン飛行管理の司令塔の役割を果たします。
また、最近ではクラウドサービスとの接続、顧客企業の外部システムへの統合API(※25)、ドローン飛行練習用のシミュレーションソフトウエアなども重要になってきており、当社においても開発、商品化を行っております。
■ PF-Station - 飛行経路を遠隔モニターしているときの遠隔端末上(パソコンなど)の表示状況
■ 当社製品であるインダストリアル向けプラットフォーム機体「ACSL-PF1」の技術要素
(3)国家プロジェクトへの参画
当社製品・サービスがインダストリアル向けドローン業界におけるデファクト・スタンダードとなるためには、今後も継続的かつ積極的に研究開発活動を実施していくことが不可欠となります。そこで、当社では産学官連携で様々なプロジェクトに参画し、最先端の技術開発に取り組んでおります。国家プロジェクトにおいては、各プロジェクトにおいて発生した研究開発費用について、管轄機関の監査を受けて認められた金額を、助成金又は補助金として収受しております。なお、助成金又は補助金に関して、新規技術の研究開発に係るものについては、営業外収益として計上しております。また、新規の研究開発を行わず、既存の当社の技術を用いて委託された実験を行うことが主目的であるものについては、売上高として計上しております。
当社が現在取り組んでいる主な国家プロジェクトは、以下のとおりです。
| 国家プロジェクト | 主な内容 |
| 国立研究開発法人新エネルギー・産業技術総合開発機構(NEDO) SIP(戦略的イノベーション創造プログラム)インフラ維持管理・更新・マネジメント技術 | ・日本電気株式会社、一般社団法人首都高速技術センター、国立研究開発法人産業技術総合研究所からなる橋梁点検プロジェクトに参画 ・非GPS環境での飛行技術の開発 |
| NEDO 無人航空機の運航管理システム及び衝突回避技術の開発 | 壁等の対象物及び機体間同士の衝突を避ける技術を開発 |
| NEDO ロボット・ドローン機体の性能評価基準等の開発 | 物流業界に特化してドローンの性能や安全性に関する性能評価基準と検証方法を制定 |
| NEDO AIシステム共同開発 | プラント設備をドローンを用いて画像撮影し、AIを用いた点検判定の自動化を開発 |
| 国立研究開発法人農業・食品産業技術総合研究機構生物系特定産業技術研究支援センター ドローンを利用した高効率漁場探索システムの開発 | 船舶から離着陸可能な魚影撮影ドローン並びに映像伝送技術の開発 |
| 内閣府 タフ・ロボティクス・チャレンジ | 大規模災害の緊急対応、復旧、予防減災能力向上などを目指したタフな飛行ロボットの実現 |
[事業系統図]
(注)パートナー企業の一部を対象に、当社のドローンの転売又はドローンに付加価値を追加したソリューションをパートナークライアントの事業として商用展開を可能とすることを想定し、「ソリューションパートナー」契約を締結しております。用語解説
本項「3 事業の内容」において使用しております用語の定義について以下に記します。
| No. | 用語 | 用語の定義 |
| ※1 | ドローン | 遠隔操縦あるいは自律式の無人航空機一般 |
| ※2 | 自律制御 | 機体の自律行動を実現する制御方式あるいは技術 |
| ※3 | IoT | Internet of Thingsの略称。コンピューターに限らず、家電製品や自動車等のハードウエア機器をインターネットに接続し、情報をやり取りすることで生まれるイノベーションの総称 |
| ※4 | プラットフォーム | 必要最低限の技術要素をパッケージ化した技術の塊のことを意味し、カスタム製品や搭載物を変えて用途別製品を開発する際に使用できる基盤となる一連の技術要素の組み合わせのこと |
| ※5 | 概念検証(PoC:Proof of Concept) | 新たな概念やアイデアの実現可能性を示すために、可能な範囲で限られた手段を組み合わせて試験的な実験を行うこと。デモンストレーションによって特定の概念や理論の実用化が可能であることを示すこと |
| ※6 | GPS | Global Positioning Systemの略称で、全地球無線測位システムを指す。カーナビゲーションシステムなどに利用されているシステム |
| ※7 | 自律飛行 | 事前のプログラミングなどにより人の操縦がなくても飛行可能な飛行方法 |
| ※8 | SLAM | Simultaneous Localization and Mappingの略称で各種センサーから取得した情報から、自己位置推定と地図作成を同時に行うこと |
| ※9 | クラウド | サーバーやストレージ、ネットワークのインフラやソフトウエアを持たなくても、インターネットを通じて、サービスを必要な時に必要な分だけ利用することが可能なサービス |
| ※10 | AI | Artificial Intelligenceの略称。学習・推論・認識・判断などの人間の知能的な振る舞いを行うコンピュータシステム |
| ※11 | モデルベース | 制御対象の運動を数学モデルによって表現することに基づいた制御設計技術 |
| ※12 | 非線形制御 | 制御理論、制御技術の一つであり、一般的にPID制御よりも高度な数学が用いられ、制御対象をより正確に制御することが可能な制御技術 |
| ※13 | アルゴリズム | コンピューター上における問題を解くための手順・解き方 |
| ※14 | PID制御 | 比例(P)制御、積分(I)制御、微分(D)制御の組み合わせによって、設定された目標値にフィードバック(検出値)を一致させる制御機能を指す。速度、圧力、流量、温度などの制御に使用される技術 |
| ※15 | GNSS | Global Navigation Satellite Systemの略称で、全地球測位システムを指す。人工衛星を使用して地上の現在位置を計測する「衛星測位システム」のうち、全地球を測位対象とすることができるシステム |
| ※16 | ステレオカメラ | 対象物を複数の異なる方向から同時に撮影することにより、その奥行き方向の情報も記録できるようにしたカメラ |
| ※17 | デジタルコンパス | 電子的なセンサーによって地磁気を検知し方位を判定する機能若しくはその機能を搭載した製品 |
| ※18 | FMEA | Failure Mode and Effect Analysisの略称であり、製品又はプロセスについて、問題が発生する前に問題(故障モード)を識別することと、それが波及する影響の解析をすることを含む、故障を予防する体系的な手法。あくまで解析結果のため、それに対する対応策が各種フェールセーフ機能となる |
| ※19 | フェールセーフ | 誤操作を起こさない又は誤操作をした場合でも事故が起こらないようにする機能。当社では、故障が起きたときに対する安全機能全般と定義している。フォルトトレランスはフェールセーフの一つ |
| ※20 | CFRP | Carbon Fiber Reinforced Plasticsの略称でプラスチック、つまり樹脂を炭素繊維で強化することで、樹脂単体よりも高い強度や剛性を得ることを可能とした「炭素繊維強化プラスチック」のこと |
| No. | 用語 | 用語の定義 |
| ※21 | LiPO | リチウムイオンポリマー二次電池のこと。正極と負極の間をリチウムイオンが移動することで充電や放電を行う二次電池であるリチウムイオン二次電池の一種 |
| ※22 | IPX3 | 「IP」とは「IEC(国際電気標準会議)」によって定められている防水・防塵の保護規格でありIPX3は0.07L/分の水を鉛直から60度、10分間放水した際の防水性 |
| ※23 | アプリケーション | 特定の作業の総称。特定の用途のためのソフトウエアのことを指し、アプリケーションソフトウエアを意味する |
| ※24 | キャッチャー | 物を掴む、運搬するための機能・装置。機体に実装することによって、人の手に代わって作業を行うことが可能になる |
| ※25 | API | Application Programming Interfaceの略称であり、コンピュータプログラム(ソフトウェア)の機能や管理するデータなどを、外部の他のプログラムから呼び出して利用するための手順やデータ形式などを定めた規約のこと |
| ※26 | CoreAPI | ソフトウエア同士が互いにやりとりするのに使用するJAVA言語でのインターフェース |