有価証券届出書(新規公開時)
事業内容
2 沿革に記載のとおり、当社は、官民一体となって知見や技術を結集し、自動運転実現に貢献するHDマップの研究開発を進めてまいりました。HDマップとは、正式名称を「High Definition Map(高精度3次元地図データ)」と言い、自動運転機能を持つ自動車両の安全な走行に重要な役割を担うものです。中長期的には、自動運転(注1)や先進運転支援システム(注2)をはじめとした自動走行向けだけではなく、インフラ維持管理システムや防災・減災システムにおいても活用することで、高精度位置情報の提供を通じて、あらゆる産業における共通基盤を目指すことを当社グループビジョンに掲げております。
当社グループは、自動運転や先進運転支援システムを開発・提供する自動車メーカー等に整備したHDマップをライセンス供与することで収益化しております。また、車両に搭載されたHDマップは道路の経年変化に合わせてアップデートを行うことが必要であるため、その更新に関する対価も収受しております。HDマップをご利用いただく自動車メーカー、搭載車種・搭載車両台数の増加に伴い、業容を拡大してまいりました。
また、自動運転や先進運転支援システム向け以外へのHDマップの用途拡大、HDマップに関する技術を活用したソリューション提供を行い、一層の業容拡大につなげるべく事業展開してまいりました。
当社グループは、当社、連結子会社6社(Dynamic Map Platform North America, Inc.、Dynamic Map Platform Europe, GmbH、Dynamic Map Platform Korea, LLC、ダイナミックマッププラットフォームAxyz株式会社、Dynamic Map Platform Arabia Limited、DYNAMIC MAP PLATFORM DATA-L.L.C)の計7社で構成されており、販売地域を基に「国内」と「海外」に分類しております。なお、事業の区分は「第5経理の状況 1連結財務諸表等(1)連結財務諸表 注記事項」に掲げるセグメント情報の区分と同一であります。
<国内>国内の自動車専用道路、高速道路及び一般道の計測及び図化を行い、それらを統合して自動運転や先進運転支援システムに有用なHDマップを生成・販売しております(以下、オートモーティブビジネス)。また、HDマップの生成の過程における計測業務を通じて収集される高精度3次元点群データ(注3)の活用による、自動運転及び先進運転支援システム用途以外でのソリューション提供(以下、3Dデータビジネス)も行っております。
(主要な会社)
ダイナミックマッププラットフォーム株式会社、ダイナミックマッププラットフォームAxyz株式会社
<海外>北米、欧州、中東及び韓国における高速道路、一般道の計測及び図化を行っており、国内オートモーティブビジネスと同様、自動運転及び先進運転支援システム用HDマップを生成・販売しております。また、国内と同様、3Dデータビジネスの顧客開拓に向けたマーケティング活動やアライアンス構築に取り組むことで、事業の立ち上げを進めております。なお、2025年1月末時点において、当社グループは26か国(日本を含む)においてHDマップの整備等の事業を展開しております。
(主要な会社)
Dynamic Map Platform North America, Inc.、Dynamic Map Platform Europe, GmbH、Dynamic Map Platform Korea, LLC、Dynamic Map Platform Arabia Limited、DYNAMIC MAP PLATFORM DATA-L.L.C
これらの事業で取り扱っている製品・ソリューションの特徴は次のとおりです。
(1)オートモーティブビジネス
自動運転や先進運転支援システム向けにHDマップを生成・販売するビジネスには、その取引の性質から、自動車メーカー等から指定される地図カバレッジ・仕様に基づくHDマップの整備・更新を受注し対価を収受するプロジェクト型売上、量産車へのHDマップ搭載に際して販売台数に応じて受領するライセンスフィー及びメンテナンスフィー、法人向けHDマップライセンス等(整備済み地図データ提供によるライセンスフィー、HDマップの利用対価として自動車メーカーより収受する開発利用料等)のライセンス型売上の2つの類型があります。現時点では、プロジェクト型売上が、オートモーティブビジネスの売上の中心となっております。売上カテゴリー別の収益モデルについては、後述の(売上カテゴリー別のビジネスの概要及び収益モデル)をご参照ください。
<自動車向けHDマップの特徴>① 高い技術力を要する生成過程
当社グループのHDマップは、衛星測位、計測、図化(3Dモデル化)、統合等の高い技術力を用いて生成しています。具体的には、衛星測位においては、Multi-GNSS(注4)を利用した位置補正技術が必要となります。計測においては道路構造や交通状況に配慮した計測計画の立案、取得した点群データに対する衛星測位状況を考慮した歪除去(注5)やデータ間接合(注6)などの技術が必要となります。図化(3Dモデル化)業務においては点群からの正確な地物(注7)情報の抽出、属性付与を効率的に実施するとともに整備データ全体にわたる高度な品質管理が必要となります。当社グループの自動運転/先進運転支援システム開発や測量士等の多様な経験や資格を有する技術者陣がこれらの技術力を支えていると考えています。最後に統合業務において各顧客に応じた最終調整を行いデータ提供しております。国内のHDマップは、日系自動車メーカー10社(以下五十音順にて、いすゞ自動車株式会社、スズキ株式会社、株式会社SUBARU、ダイハツ工業株式会社、トヨタ自動車株式会社、日産自動車株式会社、日野自動車株式会社、本田技研工業株式会社、マツダ株式会社、三菱自動車工業株式会社)の要求に基づき共通の仕様を定義しております。
また、海外のHDマップについても生成プロセスは国内と同一のものとなっておりますが、マップ整備のための計測機材やソフトウェアツールは必要に応じて地域に最適と判断したものを活用しています。なお、海外においては、Dynamic Map Platform North America, Inc.の事業開始当初より開発してきた汎用仕様をベースとして顧客ごとの要望に合わせた仕様を策定しております。
HDマップの生成プロセス
計測フェーズにおけるcm級の位置精度を有するデータの取得は、当社グループが有する測量技術によるものであり、データ収集に際しては、モービル・マッピング・システム(注8)(以降、MMSと記載)を用いております。整備に利用されるMMSは、高精度かつ地物の高い再現性を確保するために、Multi-GNSS対応受信機、衛星不可視区間で比較的高精度を維持する高性能IMU(Inertial Measurement Unit) (注9)、道路情報を精緻に再現する高密度レーザスキャナ(LiDAR)(注10)、高解像度カメラを搭載しており、各機器が衛星時刻情報で同期されることにより計測時の状態を正確に再現可能となります。MMS車両を走行させながら、LiDARで道路面及び周辺情報をスキャンして点群データを取得することで、実際の道路とほぼ同一形状、同一サイズのデジタル空間上の道路データを表現できます。
MMSにより取得した高精度3次元点群データを基に、自動運転や先進運転支援システムに必要な様々な情報、例えば区画線や道路標識、交差点領域等の地物を抽出して3Dモデル化することを図化と呼びます。図化は予め地物毎に定められた取得基準に基づき行われ、自動・手動の組合せで実施されます。手動で実施する作業は当社グループが保有するIT技術の採用により順次自動化していくことで品質を維持・向上させながら効率化を図っております。
なお、スマートフォンのアプリケーションやカーナビゲーションシステムに用いられる従来の一般的な地図データ(SDマップ)において車線数や交差点などの情報は具備されますが、各々の物理的な3次元位置情報は高精度には保有されていません。
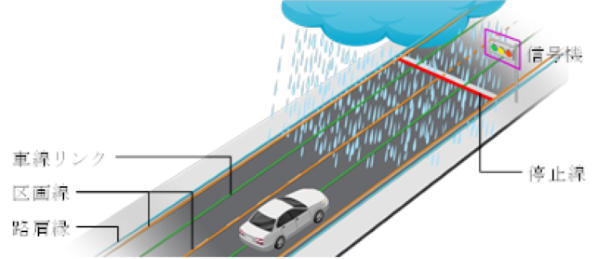
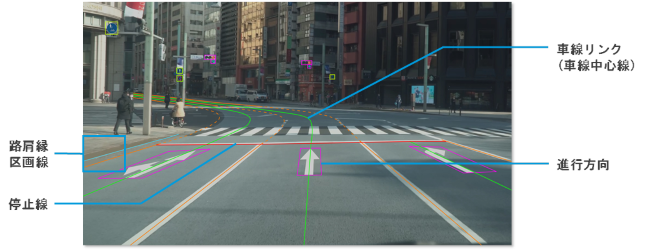
② 従来地図とは異なる情報・精度
HDマップは機械が読み込み、制御に活用されることを目的としております。このため、従来の一般的な地図データ(SDマップ)と比べ、立体性(道路の構造や起伏を表す高度情報や標識などの立体構造物情報など)・保有情報(道路の曲率や勾配、停止線と信号機の対応付けなど)・位置精度において、より精度の高い情報が求められます。
データの精度に関しては上述の計測プロセスにより、衛星測位システムの受信が良好な状況においては、絶対精度10cm以内、相対精度1㎝以内のデータ収集が可能であり、このデータを基にした図化業務を含め、全体プロセスとしてcm級の精度を実現しております。
従来の一般的な地図データ(SDマップ)との違い
SDマップとHDマップとでは上記のような相違がある他、生成過程においても、HDマップでは高精度に位置情報を把握できるMMSを利用する等の相違があります。
③ 自動運転高度レベル2以上に有用な機能
国内外で共通認識となっている自動運転のレベルは、米国の自動車技術会(SAE:Society of Automotive Engineers)(注11)によって定義され、レベル0からレベル5の6段階に区分されます。レベル1やレベル2では、HDマップによる機能強化はあり得るものの、車体制御は主にカメラ、ミリ波レーダー、LiDARを用いて行われております。一方、高度レベル2(レベル2+とも言われていますが、レベル2に加えて、ハンズオフ走行、自動レーンチェンジなどが可能になるものを指します)ではより高度な車体制御を実現する観点からHDマップが広く採用されており、システム主体の車両制御となるレベル3・レベル4・レベル5では、機械の可読性、制御への利用容易性の観点で特に有用な技術とされています。
自動運転レベル
(※1)運転操作の主体:
車両の操縦のために必要な、認知、予測、判断及び操作の行為を行う責任主体を指す。
(※2)特定条件:
システムが自動運転を行うために必要な特定の環境や状況を指し、場所、天候、速度等が含まれます。「特定条件」として、特定の地理的範囲や道路環境が設定される場合には、これを「限定領域」と呼びます。例えば、高速道路のみ、特定の都市部内でのみ自動運転システムが作動する場合、これらの領域が「限定領域」となります。
(※3)条件付き:
特定の条件下でシステムが全ての運転タスクを実行することを指し、システムの作動継続が困難な場合には、運転者が適切に対応する必要があるというものです。
出所:国土交通省資料等を基に当社作成
自動運転のレベル0からレベル2まではドライバーによる監視を必要とし、レベル3以上ではシステム主体の監視となり、一部もしくは全部をドライバーの操作を介さずに自動運転を行います。
HDマップは、主には自動運転高度レベル2以上に有用な機能であり、当社グループのHDマップは自動運転及び先進運転支援システム双方に適用可能な仕様となっております。
車両に搭載されたカメラやLiDAR、ミリ波レーダーなどのセンサーが周辺の車両や歩行者、道路上の白線、標識などを認知することで、アクセルやブレーキ、ステアリング(ハンドル)の操作などの制御が可能となり自動運転及び先進運転支援システムが実現されます。しかし、センサー情報のみでは認知性能に限界があるため、HDマップと組み合わせることで、センサーが取得した画像やGPS(注12)情報等を照合しながら正確かつ安全な走行を実現しています。HDマップには、以下の3つの機能があります。
a 先読み情報
複雑な道路形状・急勾配のカーブ等でセンサーでは検知できない先読み情報を提供し、車両制御に活用
b センサー補完
経年変化による白線かすれや悪天候時での検知機能の低下等、センサー性能の限界を補完
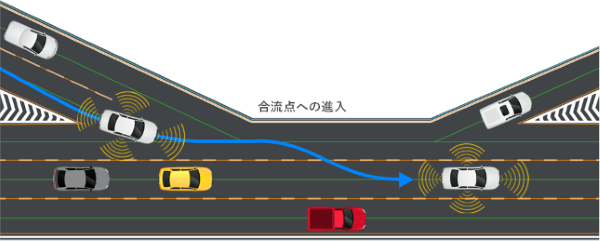
c 高精度自己位置推定(地図照合)
GPSのみでは実現できないレーン単位の位置情報を提供し、自動運転及び先進運転支援システムに有用な自車位置特定を実現
これらのHDマップの機能は、自動運転及び先進運転支援システムにおける、安定したカーブへの進入、信号機情報を把握した停車の判断、安全な交差点の右折、走行車線の選択、走行不可領域の認識、緊急時の安全な位置への自動停車などに有用であり、当社グループが提供するHDマップがより高度かつ安全な自動運転及び先進運転支援システムの実現に寄与できるものと考えております。

また、自動運転及び先進運転支援システム以外の自動車向けHDマップの活用領域としては、今後市場の拡大が見込まれるV2X(Vehicle-to-Everything=車両とあらゆるモノを通信技術で接続し連携させること)への展開や半導体メーカー等における自動運転システム開発への適用可能性があると考えております。V2Xに関しては、2024年米国運輸省は道路上の安全性や効率性を高めるため、「V2X展開加速計画」(V2Xを促進するため、アリゾナ州、テキサス州、ユタ州の3州で、約6,000万ドルの助成金を交付。米国内の全高速道路にV2Xを適用し、2036年までに自動車メーカー6社の新車にV2X技術を搭載することを目指す計画)を発表し、関連して、米国の自動車技術会(SAE、Society of Automotive Engineers)は、「V2Xシステムのための高精度ポジショニング標準」を制定し、V2Xのアプリケーションでは、車線レベルまたはそれ以上の精度のマップが必要と定義されています。2024年10月、当社は本計画の一部として、ユタ州運輸省よりHDマップ提供を受注しております。
さらに半導体メーカー等における自動運転システム開発では、各種センサー情報と共に高精度地図データを統合処理可能なソフトウェア環境を構築しており、HDマップは自己位置を特定する為の重要な要素として活用されています。また自動運転システムのAI/機械学習においても、詳細な道路情報を有するHDマップの活用余地は大きいと考えており、自動運転システムによる自動車制御能力向上に繋がると考えております。当社では、より安全な自動運転及び先進運転支援システムを実現する上で、その開発及び運用においても、正確な位置情報の特定に有用なHDマップの利用が重要になっていると考えております。
以上のように、当社グループが提供するHDマップは、量産車への搭載に加えて、海外大手地図メーカー、大手半導体メーカー、大手車載システムメーカー等の法人に対して固定価格でのHDマップの使用許諾を行うことによる利用拡大が見込め、これらの法人向けライセンスによるHDマップのライセンス売上のさらなる拡大に取り組んでおります。
当社グループのHDマップが採用されている販売車種及び販売予定が公表されている主な車種は、次のとおりです。なお、下表の他に、顧客との守秘義務契約に基づき現時点で公表していない社名・車種が複数存在し、合計で35車種に当社グループのHDマップが搭載されております。
(2025年1月末時点)
(2)3Dデータビジネス
(高精度3次元データの多用途展開)
高精度位置情報の提供を通じて、あらゆる産業における共通基盤を目指す中長期ビジョンの実現に向けて、高精度3次元データ(HDマップ及び高精度3次元点群データ)の活用による、自動運転及び先進運転支援システム用途以外でのソリューション提供を行っております。
高精度3次元点群データは、最先端かつ高度な「計測技術」を用いたMMSにより、日本・北米・欧州・韓国・中東で計測しており、その膨大な計測データを繋ぎ合わせた形でデータを提供しています。また、新規延伸や道路状況の変更にも対応できるよう、データメンテナンスを行い鮮度の保持に取り組んでいます。
当社グループが提供する高精度3次元データは、道路交通上の課題解決をはじめ多彩な用途に使用でき、様々な側面で省人化や効率化の実現、安心・安全な環境づくりに貢献できると考えています。具体的には、自動車、航空機、船舶、自律移動ロボット等の移動体の自己位置推定や周辺環境認識に有用であり、これらの制御への活用(自動走行・自動運行など)を通じて、今後進展が期待される産業のデジタル化・効率化に大きく貢献するものと考えております。
これらの産業のデジタル化・効率化に際しては、交通渋滞情報、事故情報、天候の変化、人流、荷物情報などの動的情報の統合と活用が重要であり、静的な位置情報である高精度3次元データは、これらの動的情報を紐づける為のデータ基盤となり得るものです。これら静的な情報と動的な情報を統合したものは、ダイナミックマップと呼ばれ、今後、産業界のデジタル化・効率化を支える共通基盤(プラットフォーム)の役割を果たすことが出来ると考えております。当社グループは高精度3次元データを生成・提供するなかで培った技術や知見、保有するデータアセットを活用して、自動運転及び先進運転支援システム用途以外でのソリューション提供にも取り組んでおり、具体的なデータライセンスのプロダクトとして、高精度3次元点群データを見える化するViewer機能、HDマップの生成技術を応用したGuidance機能について、それぞれ商品化し有償で提供しております。
また、高精度3次元データの更なる多用途展開に向けた取り組みとして、政府プロジェクトの受注を通じた社会課題解決に向けた研究開発に取り組んでいる他、自治体・企業等とのプロジェクト・実証実験に取り組んでおります。これらの政府・自治体・企業等との取り組みは、受注業務を通じて当社グループが保有するデータ及び高精度3次元データ関連技術、各種知見を提供することにより、社会課題解決に向けた取り組みに貢献する他、当社グループにとっては自己投資を抑制しながら新たなライセンス商品の開発に取り組むことが出来る重要な研究開発・商品開発の機会となっています。後述の除雪支援システムは、自治体と共同で取り組んだ実証実験を経て、商品開発・ライセンス商品化されたもので、政府・自治体・企業等との取り組みを通じて、当社グループが保有するデータ及び高精度3次元データ関連技術を活用する3Dデータビジネスの拡大に資するライセンス商品化を実現した事例です。現時点では、政府・自治体・企業等からの受注業務に係るプロジェクト型売上が、3Dデータビジネスの売上の中心となっております。売上カテゴリー別の収益モデルについては、後述の(売上カテゴリー別のビジネスの概要及び収益モデル)をご参照ください。
① 3Dデータビジネス – Viewer
当社グループが取得した高精度3次元点群データを確認・分析可能なWebサービス「3Dmapspocket®」を商品化、有償(契約ユーザー数及びデータ閲覧の実績に応じた従量課金)で提供しております。高精度な3次元点群データをどこからでもWebブラウザで閲覧可能で、現地へ行かずに、cm級の計測、角度計算を行うことが出来ます。このアプリケーションを活用した事業の1つとして事故調査が挙げられます。「3Dmapspocket®」を損害保険会社に有償で提供することで、高精度3次元データを用いたデジタル道路空間上において、交通事故査定における事故発生現場の調査を行うことを可能にしております。これにより、現地作業負荷の低減が可能となり、現地作業員の削減効果が期待されております。また、事故調査の他、インフラ管理にも利用されており、自律移動モビリティ(注13)やMaaS(Mobility as a Service)(注14)シミュレーションへの利用に向けた事業開発に取り組んでおります。
② 3Dデータビジネス – Guidance
当社グループが有する高精度3次元データをタブレットに搭載し、測位端末と組み合わせることで、高精度なガイダンス機能を提供しています。具体的なプロダクトとして、雪で覆われた障害物を3Dで可視化し除雪車両の運行をガイダンスすることで除雪作業を支援する「除雪支援システム」を降雪地域の自治体・民間企業に提供しております。ガードレールやマンホールの位置など雪に覆われて見えない部分の地物の把握は、これまで熟練者の長年の経験に依存して作業がなされていましたが、当該支援システムにより経験の少ない作業員でも容易に道路構造を把握出来る為、効率的かつ安全に除雪作業を行うことが可能になります。ガイダンス機能は、除雪支援のほか、空港・港湾における輸送車両の運航ガイダンスや、高精度3次元データが有する勾配情報を活かした燃費の良いルートの探索、トラックドライバーへの燃費の良い運転方法のガイダンス、といった実証実験に活用されています。
③ 3Dデータビジネスの拡大に向けた取り組み
高精度3次元データの更なる多用途展開を通じた3Dデータビジネスの拡大に向けた、国内の政府・各自治体・企業等との具体的な取り組みは以下のとおりです。
a 国立研究開発法人新エネルギー・産業技術総合開発機構(NEDO)によるグリーンイノベーション基金事業
総額2兆円の予算の元、20プロジェクトが推進されており、当社は産業構造転換分野に分類されるプロジェクトの一つである“スマートモビリティ社会の構築”に採択されました。当該プロジェクトにおいて、地物の高さや道路のレーン情報、EV充電器の位置情報等を含む当社のHDマップを、物流・人流事業者の全体最適を達成するためのシミュレーションモデルの構築及びCO2排出量の評価基盤として使用し役立てることを想定して推進しております。このプロジェクトへの参画により、シミュレーションデータを日本全国に配信するという当社グループの目標をさらに前進させることができると考えております。
b デジタルライフライン全国総合整備計画
デジタルライフライン全国総合整備計画は、社会課題解決や産業発展のデジタルによる恩恵を全国津々浦々に行きわたらせるため、約10カ年の計画として日本国政府により策定されつつあるものです。そこでは官民で集中的に大規模な投資を行い、自動運転やAIによるイノベーションを線・面で社会実装することで働き手の賃金の向上を実現するとともに、人手不足や災害激甚化といった社会課題の解決を図ることが意図されています。そうした取り組みの中で、当社は3次元空間情報基盤に係わる開発、ダイナミックマップの基盤となるデータ連携システム(車両情報連携システム等)の開発を担当しております。
そうした役割・取り組みの一つとして空間IDがあります。空間IDは、3次元空間を網のように並んだ格子状に分割し位置情報を付与することで3次元空間の位置を特定するもので、日本国土の空間に位置情報を持たせ、動的情報の検索を可能にすること等が期待されております。3次元情報と現実世界の異なる情報をリンクさせる、一般ユーザーが使用可能なデジタルインフラとして日本政府が開発を推進する中、当社は、本空間ID、及び3次元空間情報基盤に関するアーキテクチャや同基盤の仕様を前提として、3次元空間情報及び実証用基盤システムの仕様検討や整備手法の開発等に関する調査を受託して進めております。この空間IDはドローン(注15)の航路として用いられ、素性の異なるデータ同士を紐付けることでより安全な運行を可能にする等、将来における自律移動モビリティの社会実装に大きな役割を果たすことが期待されております。また、当社は国立研究開発法人新エネルギー・産業技術総合開発機構(NEDO)公募「産業DXのためのデジタルインフラ整備事業/デジタルライフラインの先行実装に資する基盤に関する研究開発」における「自動運転支援道」事業の実施予定先として採択されております。同事業において、当社は、自動運転運航に係るデータ連携システム(「自動運転支援道」の整備事業に関わる事業者全体と連携し、自動運転運行に必要な各種データの処理・接続ができるようにするためのデータ流通システム、既存の交通情報提供者や路側インフラ、車両等から提供される各種情報と当社もしくは当社グループが有する高精度3次元データを統合した情報を配信し、自動運転車両の安全走行を支援するシステム(車両情報連携システム))の開発に取り組んでいます。
c 公共エリア向けダイナミックマップの開発
乗用車向けに開発・生産中のHDマップを、MaaS(Mobility as a Service)シャトル(注16)・ドローンなどあらゆる自律移動モビリティに展開し、高齢化社会における作業効率化や自動化の実現に必要となるデジタルインフラデータの整備に向けた取り組みを進めております。具体的な取り組み例としては、「研究開発とSociety 5.0との橋渡しプログラム(Bridge)」における「公共エリア向けダイナミックマップの開発」事業を受託し、空港や港湾などをはじめとする公共エリアにおいて様々な自動運転車両が安全かつ効率的に運行する為に必要となる高精度3次元地図およびダイナミックマップの開発に取り組んでおります。
(売上カテゴリー別のビジネスの概要及び収益モデル)
当社グループの売上高については、収益モデルの違いから、プロジェクト型とライセンス型に大別できます。
プロジェクト型売上には、主にHDマップデータ整備等による事業基盤の構築や官公庁向けプロジェクトを通した研究開発投資見合いの性質があり、オートモーティブビジネスにおけるHDマップ新規整備に係る開発プロジェクト及び固定価格で受注するHDマップ更新整備に係るメンテナンスフィー、3Dデータビジネスにおける官公庁からの開発プロジェクトが含まれます。これらプロジェクト型売上は主に原価に一定のマージンを上乗せすることにより決まり、コストは受注業務履行に掛かる費用が主で売上規模に比例する変動費が中心です。
ライセンス型売上には、主に整備済みのデータやシステムをベースに、車載用や多用途向けに商品を提供するものが含まれます。オートモーティブビジネスにおける量販車へのHDマップ搭載に際し、販売台数に応じて受領するライセンスフィー及びメンテナンスフィー、法人向けHDマップライセンス等(整備済み地図データ提供によるライセンスフィー、HDマップの利用対価として自動車メーカーより収受する開発利用料等)が含まれます。また、3DデータビジネスにおけるViewerやGuidance商品を通じたライセンスフィー、法人向けデータライセンス(整備済み地図データ提供によるライセンスフィー等)が含まれます。これらライセンス型売上は主に単価に販売量(距離、台数、アカウント数、データ閲覧数など)を掛けることにより決まり、コストは整備済みのデータ更新費用、システム運用費用が主で売上規模に比例しない固定費が中心です。
(注)1.成長フェーズに記載の長期の姿は、現時点での想定であり、その達成を保証するものではありません。
2.売上カテゴリー プロジェクト型 オートモーティブビジネス HDマップ整備で整備されるHDマップデータの所有権は当社グループに帰属します。
(事業系統図)
当社グループの事業系統図は、次のとおりです。
主たるプロダクトとなるHDマップの整備については、国内においては外注先から受領した図化データに対して当社にて統合作業を行った上で顧客に提供しています。Dynamic Map Platform North America, Inc. に委託するケースにおいては、図化、統合も含め最終的なHDマップとするまでの作業をDynamic Map Platform North America, Inc. で実施しています。
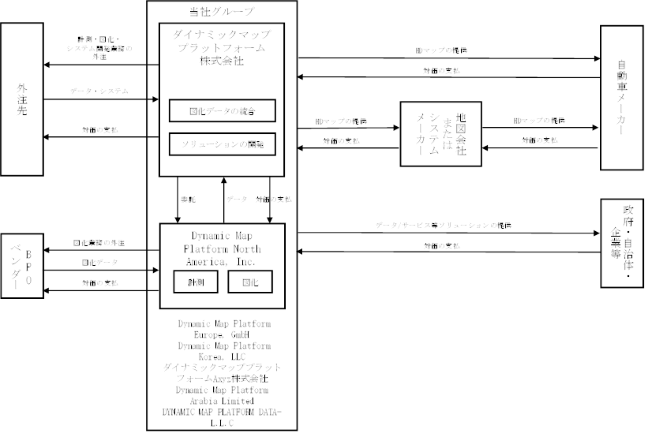
注:BPOベンダー(注17)
用語解説
当社グループは、自動運転や先進運転支援システムを開発・提供する自動車メーカー等に整備したHDマップをライセンス供与することで収益化しております。また、車両に搭載されたHDマップは道路の経年変化に合わせてアップデートを行うことが必要であるため、その更新に関する対価も収受しております。HDマップをご利用いただく自動車メーカー、搭載車種・搭載車両台数の増加に伴い、業容を拡大してまいりました。
また、自動運転や先進運転支援システム向け以外へのHDマップの用途拡大、HDマップに関する技術を活用したソリューション提供を行い、一層の業容拡大につなげるべく事業展開してまいりました。
当社グループは、当社、連結子会社6社(Dynamic Map Platform North America, Inc.、Dynamic Map Platform Europe, GmbH、Dynamic Map Platform Korea, LLC、ダイナミックマッププラットフォームAxyz株式会社、Dynamic Map Platform Arabia Limited、DYNAMIC MAP PLATFORM DATA-L.L.C)の計7社で構成されており、販売地域を基に「国内」と「海外」に分類しております。なお、事業の区分は「第5経理の状況 1連結財務諸表等(1)連結財務諸表 注記事項」に掲げるセグメント情報の区分と同一であります。
<国内>国内の自動車専用道路、高速道路及び一般道の計測及び図化を行い、それらを統合して自動運転や先進運転支援システムに有用なHDマップを生成・販売しております(以下、オートモーティブビジネス)。また、HDマップの生成の過程における計測業務を通じて収集される高精度3次元点群データ(注3)の活用による、自動運転及び先進運転支援システム用途以外でのソリューション提供(以下、3Dデータビジネス)も行っております。
(主要な会社)
ダイナミックマッププラットフォーム株式会社、ダイナミックマッププラットフォームAxyz株式会社
<海外>北米、欧州、中東及び韓国における高速道路、一般道の計測及び図化を行っており、国内オートモーティブビジネスと同様、自動運転及び先進運転支援システム用HDマップを生成・販売しております。また、国内と同様、3Dデータビジネスの顧客開拓に向けたマーケティング活動やアライアンス構築に取り組むことで、事業の立ち上げを進めております。なお、2025年1月末時点において、当社グループは26か国(日本を含む)においてHDマップの整備等の事業を展開しております。
(主要な会社)
Dynamic Map Platform North America, Inc.、Dynamic Map Platform Europe, GmbH、Dynamic Map Platform Korea, LLC、Dynamic Map Platform Arabia Limited、DYNAMIC MAP PLATFORM DATA-L.L.C
これらの事業で取り扱っている製品・ソリューションの特徴は次のとおりです。
(1)オートモーティブビジネス
自動運転や先進運転支援システム向けにHDマップを生成・販売するビジネスには、その取引の性質から、自動車メーカー等から指定される地図カバレッジ・仕様に基づくHDマップの整備・更新を受注し対価を収受するプロジェクト型売上、量産車へのHDマップ搭載に際して販売台数に応じて受領するライセンスフィー及びメンテナンスフィー、法人向けHDマップライセンス等(整備済み地図データ提供によるライセンスフィー、HDマップの利用対価として自動車メーカーより収受する開発利用料等)のライセンス型売上の2つの類型があります。現時点では、プロジェクト型売上が、オートモーティブビジネスの売上の中心となっております。売上カテゴリー別の収益モデルについては、後述の(売上カテゴリー別のビジネスの概要及び収益モデル)をご参照ください。
<自動車向けHDマップの特徴>① 高い技術力を要する生成過程
当社グループのHDマップは、衛星測位、計測、図化(3Dモデル化)、統合等の高い技術力を用いて生成しています。具体的には、衛星測位においては、Multi-GNSS(注4)を利用した位置補正技術が必要となります。計測においては道路構造や交通状況に配慮した計測計画の立案、取得した点群データに対する衛星測位状況を考慮した歪除去(注5)やデータ間接合(注6)などの技術が必要となります。図化(3Dモデル化)業務においては点群からの正確な地物(注7)情報の抽出、属性付与を効率的に実施するとともに整備データ全体にわたる高度な品質管理が必要となります。当社グループの自動運転/先進運転支援システム開発や測量士等の多様な経験や資格を有する技術者陣がこれらの技術力を支えていると考えています。最後に統合業務において各顧客に応じた最終調整を行いデータ提供しております。国内のHDマップは、日系自動車メーカー10社(以下五十音順にて、いすゞ自動車株式会社、スズキ株式会社、株式会社SUBARU、ダイハツ工業株式会社、トヨタ自動車株式会社、日産自動車株式会社、日野自動車株式会社、本田技研工業株式会社、マツダ株式会社、三菱自動車工業株式会社)の要求に基づき共通の仕様を定義しております。
また、海外のHDマップについても生成プロセスは国内と同一のものとなっておりますが、マップ整備のための計測機材やソフトウェアツールは必要に応じて地域に最適と判断したものを活用しています。なお、海外においては、Dynamic Map Platform North America, Inc.の事業開始当初より開発してきた汎用仕様をベースとして顧客ごとの要望に合わせた仕様を策定しております。
HDマップの生成プロセス
計測フェーズにおけるcm級の位置精度を有するデータの取得は、当社グループが有する測量技術によるものであり、データ収集に際しては、モービル・マッピング・システム(注8)(以降、MMSと記載)を用いております。整備に利用されるMMSは、高精度かつ地物の高い再現性を確保するために、Multi-GNSS対応受信機、衛星不可視区間で比較的高精度を維持する高性能IMU(Inertial Measurement Unit) (注9)、道路情報を精緻に再現する高密度レーザスキャナ(LiDAR)(注10)、高解像度カメラを搭載しており、各機器が衛星時刻情報で同期されることにより計測時の状態を正確に再現可能となります。MMS車両を走行させながら、LiDARで道路面及び周辺情報をスキャンして点群データを取得することで、実際の道路とほぼ同一形状、同一サイズのデジタル空間上の道路データを表現できます。
MMSにより取得した高精度3次元点群データを基に、自動運転や先進運転支援システムに必要な様々な情報、例えば区画線や道路標識、交差点領域等の地物を抽出して3Dモデル化することを図化と呼びます。図化は予め地物毎に定められた取得基準に基づき行われ、自動・手動の組合せで実施されます。手動で実施する作業は当社グループが保有するIT技術の採用により順次自動化していくことで品質を維持・向上させながら効率化を図っております。
なお、スマートフォンのアプリケーションやカーナビゲーションシステムに用いられる従来の一般的な地図データ(SDマップ)において車線数や交差点などの情報は具備されますが、各々の物理的な3次元位置情報は高精度には保有されていません。
② 従来地図とは異なる情報・精度
HDマップは機械が読み込み、制御に活用されることを目的としております。このため、従来の一般的な地図データ(SDマップ)と比べ、立体性(道路の構造や起伏を表す高度情報や標識などの立体構造物情報など)・保有情報(道路の曲率や勾配、停止線と信号機の対応付けなど)・位置精度において、より精度の高い情報が求められます。
データの精度に関しては上述の計測プロセスにより、衛星測位システムの受信が良好な状況においては、絶対精度10cm以内、相対精度1㎝以内のデータ収集が可能であり、このデータを基にした図化業務を含め、全体プロセスとしてcm級の精度を実現しております。
従来の一般的な地図データ(SDマップ)との違い
SDマップとHDマップとでは上記のような相違がある他、生成過程においても、HDマップでは高精度に位置情報を把握できるMMSを利用する等の相違があります。
③ 自動運転高度レベル2以上に有用な機能
国内外で共通認識となっている自動運転のレベルは、米国の自動車技術会(SAE:Society of Automotive Engineers)(注11)によって定義され、レベル0からレベル5の6段階に区分されます。レベル1やレベル2では、HDマップによる機能強化はあり得るものの、車体制御は主にカメラ、ミリ波レーダー、LiDARを用いて行われております。一方、高度レベル2(レベル2+とも言われていますが、レベル2に加えて、ハンズオフ走行、自動レーンチェンジなどが可能になるものを指します)ではより高度な車体制御を実現する観点からHDマップが広く採用されており、システム主体の車両制御となるレベル3・レベル4・レベル5では、機械の可読性、制御への利用容易性の観点で特に有用な技術とされています。
自動運転レベル
| 自動運転 レベル | 運転操作の主体 (※1) | 概要・定義 | 具体的内容・状況等 | |
| レベル5 | 自動運転 システム | 完全自動運転 システムが全ての動的運転タスク及び作動継続が困難な場合への応答を無制限に(すなわち、限定領域内ではない)実行 | 場所、天候、速度等の状況に関わらず、いつでもどこでも運転者が介入することなく自律的に運転できる。交通信号や標識、歩行者、他の車両など、周囲の状況を正確に認識し、適切に対応する。 | |
| レベル4 | 特定条件(※2)下における完全自動運転 システムが全ての動的運転タスク及び作動継続が困難な場合への応答を限定領域において実行 | 高速道路や特定の都市部などの「限定領域」おいて、運転者が介入することなく自律的に運転できる。「限定領域」外では、自動運転が出来ない。 | ||
| レベル3 | 自動運転 システム (システムの作動が困難な場合は運転者) | 条件付き(※3)自動運転 システムが全ての動的運転タスクを限定領域において実行作動継続が困難な場合は、システムの介入要求等に運転者が適切に応答 | 高速道路や特定の都市部などの「限定領域」おいて、システムの作動継続が困難な場合はシステムの介入要求等に運転者が適切に応答する条件付きで、自律的に運転できる。システムの介入要求がある際には、運転者が適切に応答する必要があり、運転者が必要。 | |
| レベル2+ | 運転者 | 特定条件下での自動運転機能(高機能化) レベル2に車線変更や合流、分岐、遅いクルマの追い越しなど高度な運転支援機能を追加したもの | 車線変更や合流、分岐、遅いクルマの追い越しなどの複雑な運転操作をシステムが自動で行う。一定の条件下でハンズフリー走行が可能。運転者は常に運転状況を監視し、必要に応じて介入する準備が求められる。 | |
| レベル2 | 特定条件下での自動運転機能(レベル1の組み合わせ) システムが縦方向及び横方向両方の車両運動制御のサブタスクを限定領域において実行 | レベル1の機能の組み合わせによる運転支援が可能。具体的には、車線を維持しながら、前方車両との距離を保ち追随することが出来る。 | ||
| レベル1 | 運転支援 システムが縦方向又は横方向のいずれかの車両運動制御のサブタスクを限定領域において実行 | システムが前後・左右のいずれかの車両制御を実施する。 例: 自動ブレーキ、自動前車追随機能、自動車線維持機能 | ||
| レベル0 | 運転者が全ての動的運転タスクを実行 | |||
(※1)運転操作の主体:
車両の操縦のために必要な、認知、予測、判断及び操作の行為を行う責任主体を指す。
(※2)特定条件:
システムが自動運転を行うために必要な特定の環境や状況を指し、場所、天候、速度等が含まれます。「特定条件」として、特定の地理的範囲や道路環境が設定される場合には、これを「限定領域」と呼びます。例えば、高速道路のみ、特定の都市部内でのみ自動運転システムが作動する場合、これらの領域が「限定領域」となります。
(※3)条件付き:
特定の条件下でシステムが全ての運転タスクを実行することを指し、システムの作動継続が困難な場合には、運転者が適切に対応する必要があるというものです。
出所:国土交通省資料等を基に当社作成
自動運転のレベル0からレベル2まではドライバーによる監視を必要とし、レベル3以上ではシステム主体の監視となり、一部もしくは全部をドライバーの操作を介さずに自動運転を行います。
HDマップは、主には自動運転高度レベル2以上に有用な機能であり、当社グループのHDマップは自動運転及び先進運転支援システム双方に適用可能な仕様となっております。
a 先読み情報
複雑な道路形状・急勾配のカーブ等でセンサーでは検知できない先読み情報を提供し、車両制御に活用
b センサー補完
経年変化による白線かすれや悪天候時での検知機能の低下等、センサー性能の限界を補完
c 高精度自己位置推定(地図照合)
GPSのみでは実現できないレーン単位の位置情報を提供し、自動運転及び先進運転支援システムに有用な自車位置特定を実現
これらのHDマップの機能は、自動運転及び先進運転支援システムにおける、安定したカーブへの進入、信号機情報を把握した停車の判断、安全な交差点の右折、走行車線の選択、走行不可領域の認識、緊急時の安全な位置への自動停車などに有用であり、当社グループが提供するHDマップがより高度かつ安全な自動運転及び先進運転支援システムの実現に寄与できるものと考えております。
また、自動運転及び先進運転支援システム以外の自動車向けHDマップの活用領域としては、今後市場の拡大が見込まれるV2X(Vehicle-to-Everything=車両とあらゆるモノを通信技術で接続し連携させること)への展開や半導体メーカー等における自動運転システム開発への適用可能性があると考えております。V2Xに関しては、2024年米国運輸省は道路上の安全性や効率性を高めるため、「V2X展開加速計画」(V2Xを促進するため、アリゾナ州、テキサス州、ユタ州の3州で、約6,000万ドルの助成金を交付。米国内の全高速道路にV2Xを適用し、2036年までに自動車メーカー6社の新車にV2X技術を搭載することを目指す計画)を発表し、関連して、米国の自動車技術会(SAE、Society of Automotive Engineers)は、「V2Xシステムのための高精度ポジショニング標準」を制定し、V2Xのアプリケーションでは、車線レベルまたはそれ以上の精度のマップが必要と定義されています。2024年10月、当社は本計画の一部として、ユタ州運輸省よりHDマップ提供を受注しております。
さらに半導体メーカー等における自動運転システム開発では、各種センサー情報と共に高精度地図データを統合処理可能なソフトウェア環境を構築しており、HDマップは自己位置を特定する為の重要な要素として活用されています。また自動運転システムのAI/機械学習においても、詳細な道路情報を有するHDマップの活用余地は大きいと考えており、自動運転システムによる自動車制御能力向上に繋がると考えております。当社では、より安全な自動運転及び先進運転支援システムを実現する上で、その開発及び運用においても、正確な位置情報の特定に有用なHDマップの利用が重要になっていると考えております。
以上のように、当社グループが提供するHDマップは、量産車への搭載に加えて、海外大手地図メーカー、大手半導体メーカー、大手車載システムメーカー等の法人に対して固定価格でのHDマップの使用許諾を行うことによる利用拡大が見込め、これらの法人向けライセンスによるHDマップのライセンス売上のさらなる拡大に取り組んでおります。
当社グループのHDマップが採用されている販売車種及び販売予定が公表されている主な車種は、次のとおりです。なお、下表の他に、顧客との守秘義務契約に基づき現時点で公表していない社名・車種が複数存在し、合計で35車種に当社グループのHDマップが搭載されております。
(2025年1月末時点)
| 社名 | 販売車種 |
| トヨタ自動車株式会社 | ・レクサス LS 2021年 ・MIRAI 2021年 |
| 日産自動車株式会社 | ・スカイライン 2019/2020年 ・アリア 2022年 ・セレナ 2023年 ・Nissan Rogue 2025年 ・Nissan Armada 2025年 ・Infiniti QX80 2025年 |
| 本田技研工業株式会社 | ・レジェンド・ハイブリッドEX 2020年 ・Acura ZDX 2024年 |
| General Motors Company | Cadillac ・CT6 AWD 2018年 ・Escalade 2021年 ・CT5 2021年 ・CT4 2021年 ・XT6 2022年 ・Lyriq 2023年 ・Optiq 2025年 GMC ・HUMMER EV 2022年 ・HUMMER EV SUV 2024年 ・Yukon Denali 2022年 ・Yukon Denali XL 2022年 ・Sierra Crew Cab 2022年 ・Sierra Crew Cab EV 2022年 ・Acadia 2024年 Chevrolet ・BOLT EUV 2022年 ・Tahoe 2022年 ・Suburban 2022年 ・Silverado Crew Cab 2022年 ・Silverado Crew Cab EV 2022年 ・Blazer EV 2024年 ・Traverse 2024年 ・Equinox EV 2024年 Buick ・Enclave 2025年 |
(2)3Dデータビジネス
(高精度3次元データの多用途展開)
高精度位置情報の提供を通じて、あらゆる産業における共通基盤を目指す中長期ビジョンの実現に向けて、高精度3次元データ(HDマップ及び高精度3次元点群データ)の活用による、自動運転及び先進運転支援システム用途以外でのソリューション提供を行っております。
高精度3次元点群データは、最先端かつ高度な「計測技術」を用いたMMSにより、日本・北米・欧州・韓国・中東で計測しており、その膨大な計測データを繋ぎ合わせた形でデータを提供しています。また、新規延伸や道路状況の変更にも対応できるよう、データメンテナンスを行い鮮度の保持に取り組んでいます。
当社グループが提供する高精度3次元データは、道路交通上の課題解決をはじめ多彩な用途に使用でき、様々な側面で省人化や効率化の実現、安心・安全な環境づくりに貢献できると考えています。具体的には、自動車、航空機、船舶、自律移動ロボット等の移動体の自己位置推定や周辺環境認識に有用であり、これらの制御への活用(自動走行・自動運行など)を通じて、今後進展が期待される産業のデジタル化・効率化に大きく貢献するものと考えております。
これらの産業のデジタル化・効率化に際しては、交通渋滞情報、事故情報、天候の変化、人流、荷物情報などの動的情報の統合と活用が重要であり、静的な位置情報である高精度3次元データは、これらの動的情報を紐づける為のデータ基盤となり得るものです。これら静的な情報と動的な情報を統合したものは、ダイナミックマップと呼ばれ、今後、産業界のデジタル化・効率化を支える共通基盤(プラットフォーム)の役割を果たすことが出来ると考えております。当社グループは高精度3次元データを生成・提供するなかで培った技術や知見、保有するデータアセットを活用して、自動運転及び先進運転支援システム用途以外でのソリューション提供にも取り組んでおり、具体的なデータライセンスのプロダクトとして、高精度3次元点群データを見える化するViewer機能、HDマップの生成技術を応用したGuidance機能について、それぞれ商品化し有償で提供しております。
また、高精度3次元データの更なる多用途展開に向けた取り組みとして、政府プロジェクトの受注を通じた社会課題解決に向けた研究開発に取り組んでいる他、自治体・企業等とのプロジェクト・実証実験に取り組んでおります。これらの政府・自治体・企業等との取り組みは、受注業務を通じて当社グループが保有するデータ及び高精度3次元データ関連技術、各種知見を提供することにより、社会課題解決に向けた取り組みに貢献する他、当社グループにとっては自己投資を抑制しながら新たなライセンス商品の開発に取り組むことが出来る重要な研究開発・商品開発の機会となっています。後述の除雪支援システムは、自治体と共同で取り組んだ実証実験を経て、商品開発・ライセンス商品化されたもので、政府・自治体・企業等との取り組みを通じて、当社グループが保有するデータ及び高精度3次元データ関連技術を活用する3Dデータビジネスの拡大に資するライセンス商品化を実現した事例です。現時点では、政府・自治体・企業等からの受注業務に係るプロジェクト型売上が、3Dデータビジネスの売上の中心となっております。売上カテゴリー別の収益モデルについては、後述の(売上カテゴリー別のビジネスの概要及び収益モデル)をご参照ください。
① 3Dデータビジネス – Viewer
当社グループが取得した高精度3次元点群データを確認・分析可能なWebサービス「3Dmapspocket®」を商品化、有償(契約ユーザー数及びデータ閲覧の実績に応じた従量課金)で提供しております。高精度な3次元点群データをどこからでもWebブラウザで閲覧可能で、現地へ行かずに、cm級の計測、角度計算を行うことが出来ます。このアプリケーションを活用した事業の1つとして事故調査が挙げられます。「3Dmapspocket®」を損害保険会社に有償で提供することで、高精度3次元データを用いたデジタル道路空間上において、交通事故査定における事故発生現場の調査を行うことを可能にしております。これにより、現地作業負荷の低減が可能となり、現地作業員の削減効果が期待されております。また、事故調査の他、インフラ管理にも利用されており、自律移動モビリティ(注13)やMaaS(Mobility as a Service)(注14)シミュレーションへの利用に向けた事業開発に取り組んでおります。
② 3Dデータビジネス – Guidance
当社グループが有する高精度3次元データをタブレットに搭載し、測位端末と組み合わせることで、高精度なガイダンス機能を提供しています。具体的なプロダクトとして、雪で覆われた障害物を3Dで可視化し除雪車両の運行をガイダンスすることで除雪作業を支援する「除雪支援システム」を降雪地域の自治体・民間企業に提供しております。ガードレールやマンホールの位置など雪に覆われて見えない部分の地物の把握は、これまで熟練者の長年の経験に依存して作業がなされていましたが、当該支援システムにより経験の少ない作業員でも容易に道路構造を把握出来る為、効率的かつ安全に除雪作業を行うことが可能になります。ガイダンス機能は、除雪支援のほか、空港・港湾における輸送車両の運航ガイダンスや、高精度3次元データが有する勾配情報を活かした燃費の良いルートの探索、トラックドライバーへの燃費の良い運転方法のガイダンス、といった実証実験に活用されています。
③ 3Dデータビジネスの拡大に向けた取り組み
高精度3次元データの更なる多用途展開を通じた3Dデータビジネスの拡大に向けた、国内の政府・各自治体・企業等との具体的な取り組みは以下のとおりです。
a 国立研究開発法人新エネルギー・産業技術総合開発機構(NEDO)によるグリーンイノベーション基金事業
総額2兆円の予算の元、20プロジェクトが推進されており、当社は産業構造転換分野に分類されるプロジェクトの一つである“スマートモビリティ社会の構築”に採択されました。当該プロジェクトにおいて、地物の高さや道路のレーン情報、EV充電器の位置情報等を含む当社のHDマップを、物流・人流事業者の全体最適を達成するためのシミュレーションモデルの構築及びCO2排出量の評価基盤として使用し役立てることを想定して推進しております。このプロジェクトへの参画により、シミュレーションデータを日本全国に配信するという当社グループの目標をさらに前進させることができると考えております。
b デジタルライフライン全国総合整備計画
デジタルライフライン全国総合整備計画は、社会課題解決や産業発展のデジタルによる恩恵を全国津々浦々に行きわたらせるため、約10カ年の計画として日本国政府により策定されつつあるものです。そこでは官民で集中的に大規模な投資を行い、自動運転やAIによるイノベーションを線・面で社会実装することで働き手の賃金の向上を実現するとともに、人手不足や災害激甚化といった社会課題の解決を図ることが意図されています。そうした取り組みの中で、当社は3次元空間情報基盤に係わる開発、ダイナミックマップの基盤となるデータ連携システム(車両情報連携システム等)の開発を担当しております。
そうした役割・取り組みの一つとして空間IDがあります。空間IDは、3次元空間を網のように並んだ格子状に分割し位置情報を付与することで3次元空間の位置を特定するもので、日本国土の空間に位置情報を持たせ、動的情報の検索を可能にすること等が期待されております。3次元情報と現実世界の異なる情報をリンクさせる、一般ユーザーが使用可能なデジタルインフラとして日本政府が開発を推進する中、当社は、本空間ID、及び3次元空間情報基盤に関するアーキテクチャや同基盤の仕様を前提として、3次元空間情報及び実証用基盤システムの仕様検討や整備手法の開発等に関する調査を受託して進めております。この空間IDはドローン(注15)の航路として用いられ、素性の異なるデータ同士を紐付けることでより安全な運行を可能にする等、将来における自律移動モビリティの社会実装に大きな役割を果たすことが期待されております。また、当社は国立研究開発法人新エネルギー・産業技術総合開発機構(NEDO)公募「産業DXのためのデジタルインフラ整備事業/デジタルライフラインの先行実装に資する基盤に関する研究開発」における「自動運転支援道」事業の実施予定先として採択されております。同事業において、当社は、自動運転運航に係るデータ連携システム(「自動運転支援道」の整備事業に関わる事業者全体と連携し、自動運転運行に必要な各種データの処理・接続ができるようにするためのデータ流通システム、既存の交通情報提供者や路側インフラ、車両等から提供される各種情報と当社もしくは当社グループが有する高精度3次元データを統合した情報を配信し、自動運転車両の安全走行を支援するシステム(車両情報連携システム))の開発に取り組んでいます。
c 公共エリア向けダイナミックマップの開発
乗用車向けに開発・生産中のHDマップを、MaaS(Mobility as a Service)シャトル(注16)・ドローンなどあらゆる自律移動モビリティに展開し、高齢化社会における作業効率化や自動化の実現に必要となるデジタルインフラデータの整備に向けた取り組みを進めております。具体的な取り組み例としては、「研究開発とSociety 5.0との橋渡しプログラム(Bridge)」における「公共エリア向けダイナミックマップの開発」事業を受託し、空港や港湾などをはじめとする公共エリアにおいて様々な自動運転車両が安全かつ効率的に運行する為に必要となる高精度3次元地図およびダイナミックマップの開発に取り組んでおります。
(売上カテゴリー別のビジネスの概要及び収益モデル)
当社グループの売上高については、収益モデルの違いから、プロジェクト型とライセンス型に大別できます。
プロジェクト型売上には、主にHDマップデータ整備等による事業基盤の構築や官公庁向けプロジェクトを通した研究開発投資見合いの性質があり、オートモーティブビジネスにおけるHDマップ新規整備に係る開発プロジェクト及び固定価格で受注するHDマップ更新整備に係るメンテナンスフィー、3Dデータビジネスにおける官公庁からの開発プロジェクトが含まれます。これらプロジェクト型売上は主に原価に一定のマージンを上乗せすることにより決まり、コストは受注業務履行に掛かる費用が主で売上規模に比例する変動費が中心です。
ライセンス型売上には、主に整備済みのデータやシステムをベースに、車載用や多用途向けに商品を提供するものが含まれます。オートモーティブビジネスにおける量販車へのHDマップ搭載に際し、販売台数に応じて受領するライセンスフィー及びメンテナンスフィー、法人向けHDマップライセンス等(整備済み地図データ提供によるライセンスフィー、HDマップの利用対価として自動車メーカーより収受する開発利用料等)が含まれます。また、3DデータビジネスにおけるViewerやGuidance商品を通じたライセンスフィー、法人向けデータライセンス(整備済み地図データ提供によるライセンスフィー等)が含まれます。これらライセンス型売上は主に単価に販売量(距離、台数、アカウント数、データ閲覧数など)を掛けることにより決まり、コストは整備済みのデータ更新費用、システム運用費用が主で売上規模に比例しない固定費が中心です。
| 売上カテゴリー | ビジネス・取引の内容 | 顧客 | 収益モデル (価格決定方法、およびコスト構造) | 現在の 売上規模 (主たる販売地域) | 成長フェーズ (現在→長期) | ||
| ライセンス型 | 3D データ ビジネス | データ ライセンス | Guidance商品(除雪支援システム等)提供 Viewer商品(3Dmapspocket等)提供 インフラ管理用途等へのHDマップ使用許諾 | 自治体、道路会社 損害保険会社 システム開発会社等 | 単価×距離・台数 単価×アカウント数・データ閲覧数 | 小規模 (国内) | 事業化段階 → 高収益・高成長 |
| データ更新費用 システム運用費用 | |||||||
| オート モーティブ ビジネス | 量産 ライセンス | HDマップ搭載車両の販売に応じた売上 (ライセンスフィー) HDマップ搭載車両の利用期間に応じた売上 (メンテナンスフィー) | 自動車メーカー 地図メーカー 車載システムメーカー | 単価×販売台数 | 中規模 (国内・海外) | 成長段階 → 高収益・高成長 | |
| HDマップデータ更新 費用 | |||||||
| 法人 ライセンス | 開発用にHDマップデータ使用許諾 | 自動車メーカー 地図メーカー 半導体メーカー 車載システムメーカー | 単価×距離 (交渉による) | 中規模 (国内・海外) | 成長段階 → 高収益・高成長 | ||
| HDマップデータ更新 費用 | |||||||
| プロジェクト型 | 3D データ ビジネス | 政府 プロジェクト等 | 政府研究開発プロジェクト 政府・自治体・企業等のプロジェクト | 政府 自治体 企業 | 原価+マージン | 主たる売上 (国内) | 安定収益確保 → 事業基盤構築・整備の為、一定規模を継続的に取組 |
| 業務履行に掛かる費用 | |||||||
| オート モーティブ ビジネス | HDマップ 整備 | HDマップ整備・提供 | 自動車メーカー | 原価+マージン (交渉による) | 主たる売上 (海外) | 安定収益確保 → 事業基盤構築・整備の為、一定規模を継続的に取組 | |
| 計測・図化費用 | |||||||
(注)1.成長フェーズに記載の長期の姿は、現時点での想定であり、その達成を保証するものではありません。
2.売上カテゴリー プロジェクト型 オートモーティブビジネス HDマップ整備で整備されるHDマップデータの所有権は当社グループに帰属します。
(事業系統図)
当社グループの事業系統図は、次のとおりです。
主たるプロダクトとなるHDマップの整備については、国内においては外注先から受領した図化データに対して当社にて統合作業を行った上で顧客に提供しています。Dynamic Map Platform North America, Inc. に委託するケースにおいては、図化、統合も含め最終的なHDマップとするまでの作業をDynamic Map Platform North America, Inc. で実施しています。
注:BPOベンダー(注17)
用語解説
| 用語 | 内容 |
| (注1)自動運転(AD、「Autonomous Driving」) | 自動化された運転システムが運転環境をモニタリングする、2.沿革(注2)自動運転レベルに記載した自動運転レベル3以上の自動運転を指しております。 |
| (注2)先進運転支援システム(ADAS「Advanced driver-assistance system」) | ドライバー自らが運転環境をモニタリングする、2.沿革(注2)自動運転レベルに記載した自動運転レベル1、2の自動運転を指しております。 |
| (注3)3次元点群データ | 3次元測量によって得られた 3次元座標を持った点データの集合を指しております。 |
| (注4)Multi-GNSS | Multi-Global Navigation Satellite Systemの略で、複数衛星測位システムを指しております。 |
| (注5)歪除去 | 計測システム(モービル・マッピング・システム)で走行計測中に、衛星測位の状態が変化などにより取得した点群データの位置が不正確となる場合があり、これを補正する作業となります。 |
| (注6)データ間接合 | 複数箇所から計測した点群データの相対的な位置関係を決定する作業となります。 |
| (注7)地物 | 道路、境界線等、地図上に表示されるものを指しております。 |
| (注8)モービル・マッピング・システム | GPS、カメラ、レーザスキャナなどを搭載した車両を指し、高精度での計測が可能な特徴を有しております。 |
| (注9)高性能IMU | IMUとはInertial Measurement Unit(慣性計測装置)の略で、3次元の慣性運動(直行3軸方向の並進運動及び回転運動)を検出する装置です。自動運転に必要とされるデータの計測には高性能なタイプが必要となります。 |
| (注10)高密度レーザスキャナ(LiDAR) | LiDARとはLight Detection And Rangingの略で、レーザ光を照射して、その反射光の情報をもとに対象物までの距離や対象物の形などを計測するセンサーとなります。 |
| (注11)SAE | Society of Automotive Engineersの略称で、モビリティ専門家を会員とする米国の非営利団体を指しております。 |
| (注12)GPS | Global Positioning Systemの略称で、全地球測位システムを指しております。 |
| (注13)自律移動モビリティ | 周囲の環境を認識し、自律的に移動するロボットのことを指しております。事前に設定された地図データやセンサーを使用して、自分の位置を把握しながら目的地まで移動します。 |
| (注14)MaaS | Mobility as a Serviceの略称で、複数の公共交通やそれ以外の移動サービスを最適に組み合わせて検索・予約・決済等を一括で行うサービスを指しております。 |
| (注15)ドローン | 無人で遠隔操作または自動操縦で飛行できる機体一般を指しております。 |
| (注16)MaaSシャトル | 利用者の予約に応じて運行ルートやスケジュールを柔軟に調整することで効率的な移動を提供するオンデマンド型交通サービスを指しております。 |
| (注17)BPOベンダー | BPOとはBusiness Process Outsourcingの略称で業務プロセスの一部を外部の専門業者に委託することを指しております。BPOベンダーとはその業務の委託先を指しております。 |